

Heading Control System
The Mega-Guard Heading Control System (HCS) automatically controls vessel’s heading by controlling the rudders
Features

The Mega-Guard Heading Control System (HCS) automatically controls vessel’s heading by controlling the rudders. The Heading Control System fulfills the rules of classification societies and wheelmark. The reliable autopilot supports single rudders and twin
independent rudders.
The HCS is build-up with the following components:
- HCS Operator Panel
- HCS Controller
Both modules are inter-connected by a redundant Ethernet link.
The HCS Operator Panel includes an intuitive heading turning knob with integrated Accept function and a TFT touchscreen. Main operator modes are selected by pushbuttons and advanced operator modes are adjusted through touchscreen.
The HCS Controller acts as a stand-alone heading controller with interfaces to various sensors (heading, position, speed, wind, depth) and includes an analog output for Rudder Setpoint.
The Rudder Setpoint can be connected directly to an intelligent steering system or it can be connected to the Mega-Guard Steering Control System.
The Steering Control System includes control outputs to the rudder and it interfaces to the following operator panels:
- Steering Mode Panel ; select either steering by Heading Control System (HCS) or manual steering (FFU) by steering wheel, hand wheel or tiller
- Steering Panel ; panel with integrated tiller or hand wheel or with connection to external steering wheel
- NFU Panel ; emergency steering panel by pushbuttons or through thumb tiller
HCS Operator Panel

The HCS Operator Panel is equipped with the following main components:
- 5″ TFT touchscreen
- heading turning knob with integrated Accept function
- pushbuttons for mode selection
- pushbuttons for dimming
The compact DIN 144x144mm unit can be flush panel mounted and on back-side it includes quad Ethernet ports, NMEA-0183 dimming input and various analog and digital IO points. Up to four HCS Operator Panels can be inter-connected via the redundant Ethernet link.
Operator Modes
The following operator modes can be selected by pushbuttons: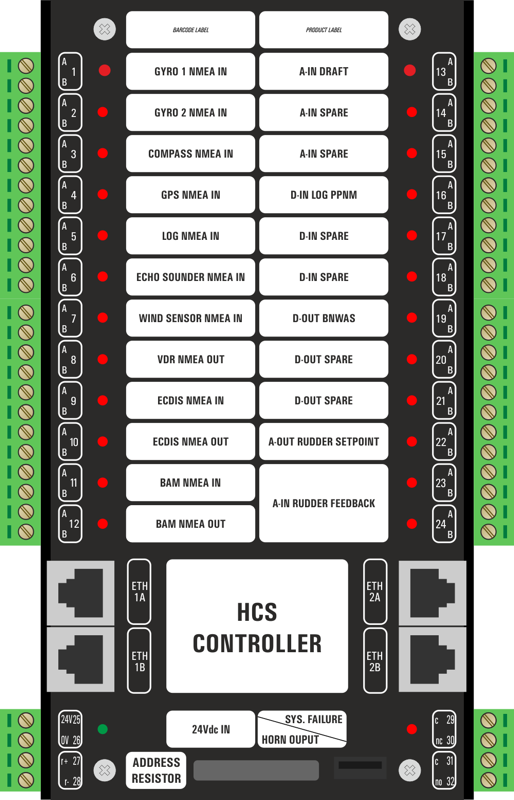
- HEADING CONTROL; the vessel keeps the heading equal to the Set Heading.
- TRACK CONTROL; the HCS receives waypoints from the ECDIS and the HCS steers the vessel from waypoint to waypoint.
- TURN RADIUS; the vessel makes one turn following the set radius.
- TURN ROT; the vessel makes a turn following the set rate of turn.
HCS Controller
The HCS Controller is equipped with the following main components:
- 3x Heading NMEA-0183 input
- 1x Position NMEA-0183 input
- 1x Speed Log NMEA-0183 input
- 1x Wind sensor NMEA-0183 input
- 1x ECDIS NMEA-0183 input/output
- 1x BAM NMEA-0183 input/output
- 1x VDR NMEA output
- 1x Spare NMEA-0183 input
- 1x Rudder Setpoint analog output
- 1x Rudder position feedback analog input
- 1x Draft analog input
- 1x Log ppnm digital input
- 1x BNWAS relay output
- 6x Spare input/output
- 4x Ethernet port
- 2x 24VDC power supply input
The HCS Controller is mounted on DIN rail inside console or inside a small cabinet for bulkhead mounting.
The HCS Controller has the following dimensions: L=198mm, W=127mm and H=37mm

The heading controller is built-up with an extended Kalman wave filter and an advanced automatic controller. The settings of the filter and controller depend on:
- vessel size
- vessel loading condition (e.g. empty or full bulk carrier or dredger)
- weather condition (wave height, wave period, current, wind)
- vessel speed
As vessel loading condition and weather condition (and speed) are continuously changing, the HCS continuously calculates the optimal settings. The new calculated settings can be automatically used by the heading controller without operator intervention or it can be selected that first the operator has to manually accept the new settings.
